
Week #8: ༼ つ ◕_◕ ༽つ Toaster ༼ つ ◕_◕ ༽つ
- May 17, 2017
- 2 min read
Wifi communication done
Driving improved
Assembled frame
Sailesh - Wifi
send string back and forth
PC to wifi-module
wifi-module to PC
Daniel - Driving
Tested out driving with new nut
wheels still not well aligned
front wheels are loose
the drive sequence for turning (1 wheel forward, other wheel back or null) doesnt work
the wheels loose on the motor, even with the 3d nut
we need to add the screw with the 3D nut
modified the driving code
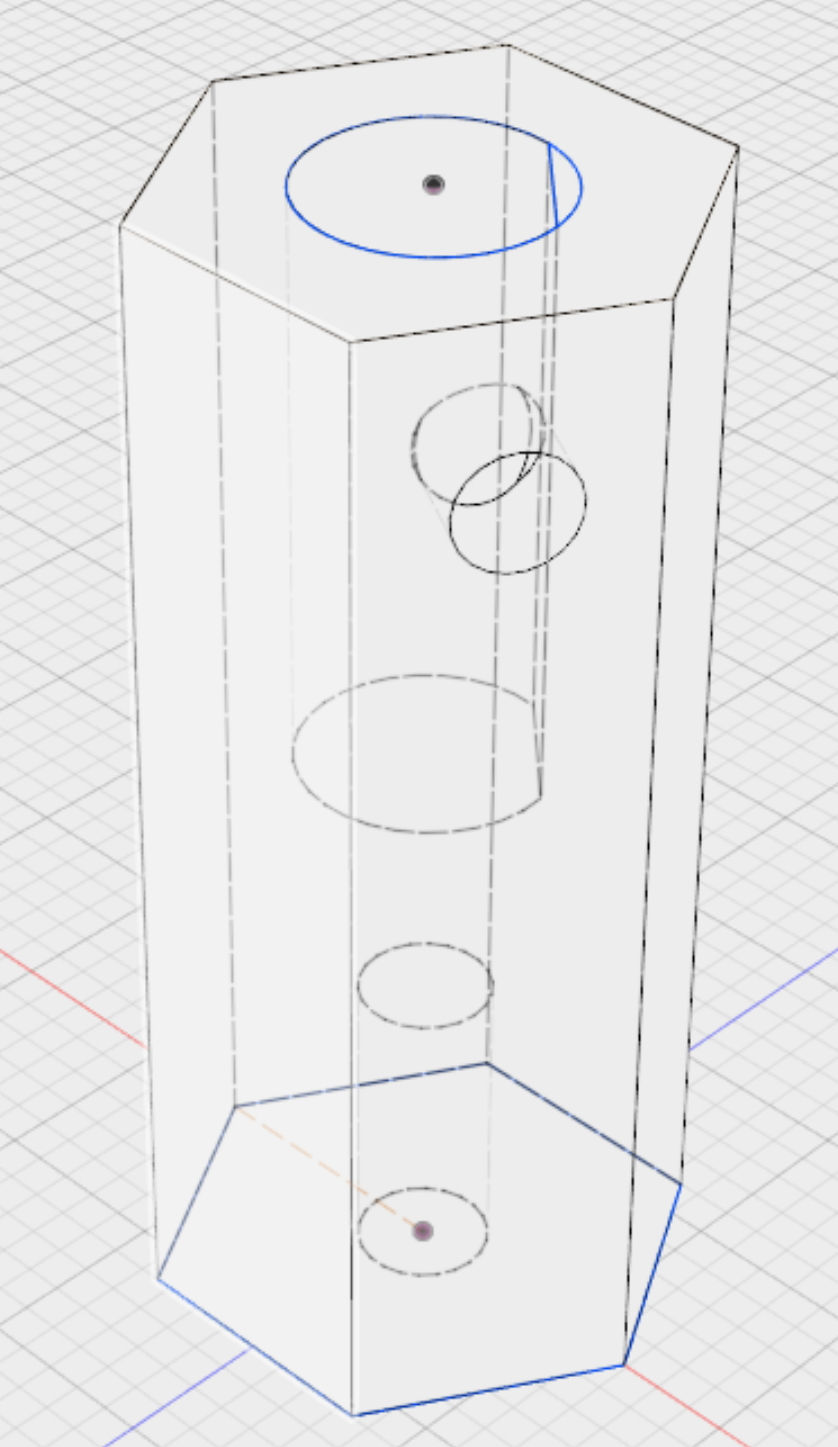
Han - 3D Nut Print
Printed nut adapter for rear wheel-motor
Daniel - PRD Updated Parts List
Sailesh - Wifi Sending images
Working on sending an image through wifi
Problem: wifi can only send/receive up to a certain size and the smallest images we can work with are just a few bytes too big
Solutions:
finding C++ alternative
remove some pixels from our image (bottom row)
study the code more
Han, Daniel - 3D print prototype
The toothed model could not go through grass so we are trying this alternative

Was unable to move through grass so we are reconsidering our design
instead of 'cutting' through the grass, we need to have more of an aerodynamic 'scoop'
round the scooping edge and round the corners
Daniel - Frame Movement
With our new nuts, we were able to turn better as the motor wheels could spin more sturdily, but we need to reconsider our front axle design. Currently it is one rod, which means the front two wheels spin together. however we want it so that. while turning, the front two wheels spin in opposite directions.
we will need 2 new stop collars and potentially 2 brackets
The front axle is cut and shortened, we will need 2 stop collars to test.
Sailesh, Jeremias - Wifi communication
Able to send full images in the minimum number of packets now
Daniel - Drive
fixed drive code so that it can perform for a much longer duration with better precision and performance
Daniel, Sailesh, Jeremias - Test Camera communication
Tested camera with communication with computer
able to perform fairly well, especially in constant (aka grassy) images
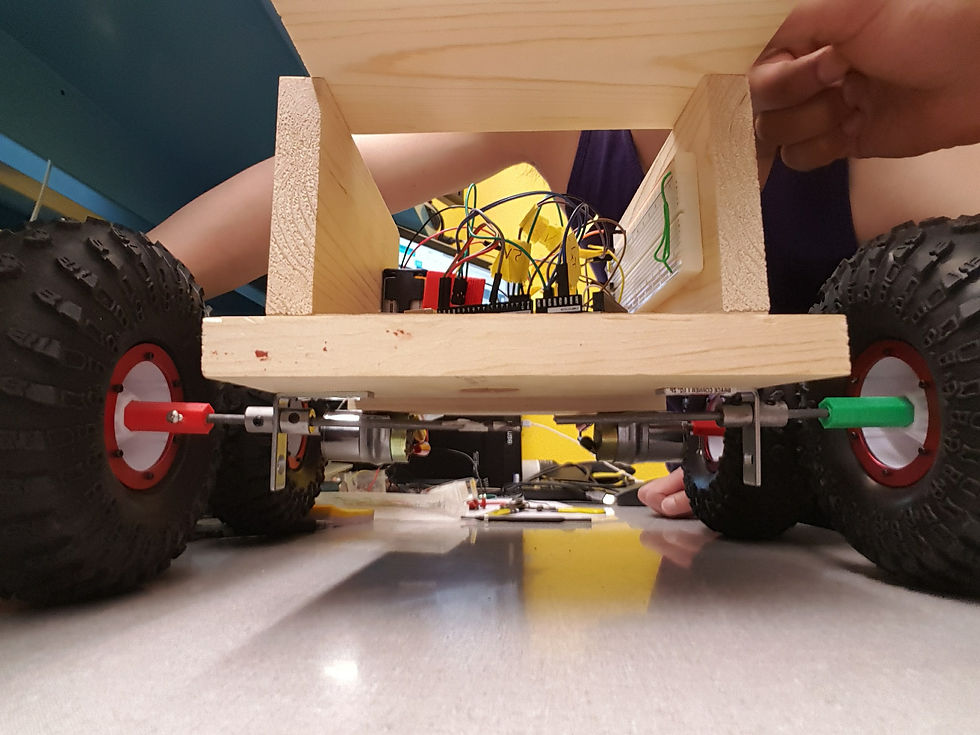
Daniel, Sailesh, Jeremias - Assembly
Assembled parts onto the frame
H-bridge
Battery
Breadboard
wifi module
power adapter
elegloo
camera
camera mount
camera tower
PS flatheads

Daniel, Sailesh, Jeremias - Redid front axle
4 brackets
4 stop collars
shortened axle
Jeremias - Kickstarter
Updated pages, including making the background more transparent
Added pictures of our robot
To Doo:
Demo
what to do if raining
umbrella or tent
carpet option
day before
find spot, set up boundaries
Kickstarter
explain what the user needs to use the pooper scooper
comparisons
system specs needed
due 6/5
describe purpose
Decals
LED
Sirens
Chrome Spray paint
Scoop
pick up shit
move with motor when on frame
test new scoop prototype in grass


















Comments