
Week #10: Are We Engineers Yet?
- May 31, 2017
- 4 min read

Daniel, Jeremias - Gyro
Testing out Gyro to improve turning
we got it able to read and print stop when it hits 90.0 the overshoot is minimal, especially since we are turning it really quickly
we can also increase the checking frequency (currently its at .5 s)
All - Drive Test With Primitive Pick Up
Test the forward, detect, slow motor, down, forward, motor up (Sailesh knows what I'm talking about)
It worked alright, but we need to re-calibrate a lot of things
Turning:
In grass, the turning is near perfect (as far as we can tell with our eyes)
One interesting thing we needed to do was change the turning distance measured by the gyro to count till 92 degrees have passed
It takes about 7 seconds to turn 90 degrees.
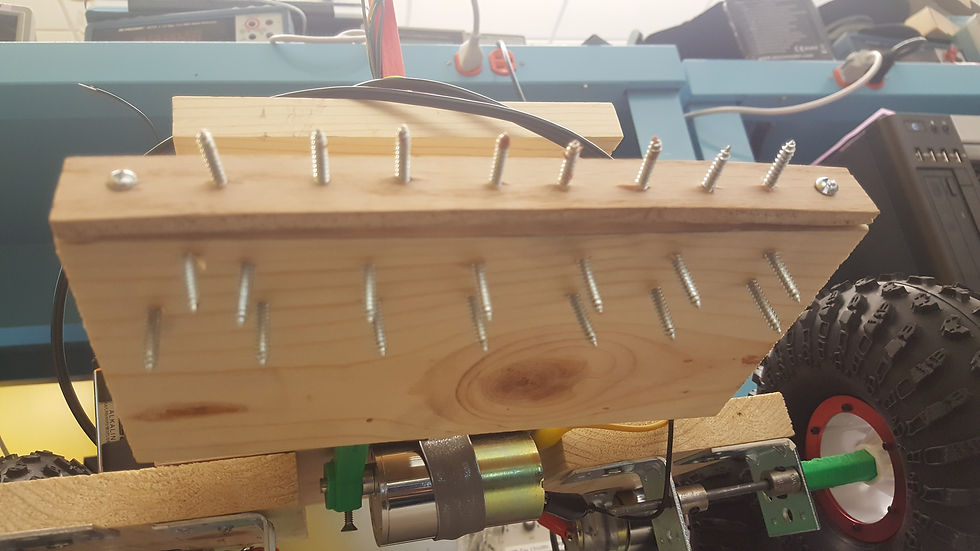
All - Implemented Stabby Array
This would give us depth for when we stab down to pick up the poop

Jeremias - Magnetometer + Gyroscope
Tried to combine the magnetometer and the gyroscope
Initially successful
Jeremias, Daniel - Mag + Gyro
There was a steady state error developed, roughly 20 degrees off
This is different from a few days ago when the mag was inconsistently off
We looked into the raw and processed values. We think that because there is a constant error, the detection is fine, we just maybe need to calibrate it or test it in multiple settings.
We think we need to try this outside where there is a potentially more constant magnetic field

Jeremias, Sailesh, Daniel - Mag + Gyro Test
Test outside and it is VERY unreliable. Sometimes its a perfect 90. Othertimes it turns for just a few degrees and stops. We are scrapping it.
Sailesh, Daniel, Jeremias - Test Run
Readjusted rear right motor to give for more space on the side
Inflating the rear wheels more to improve turning and speed
We tried this in different patches of grass and in the AstroTurf
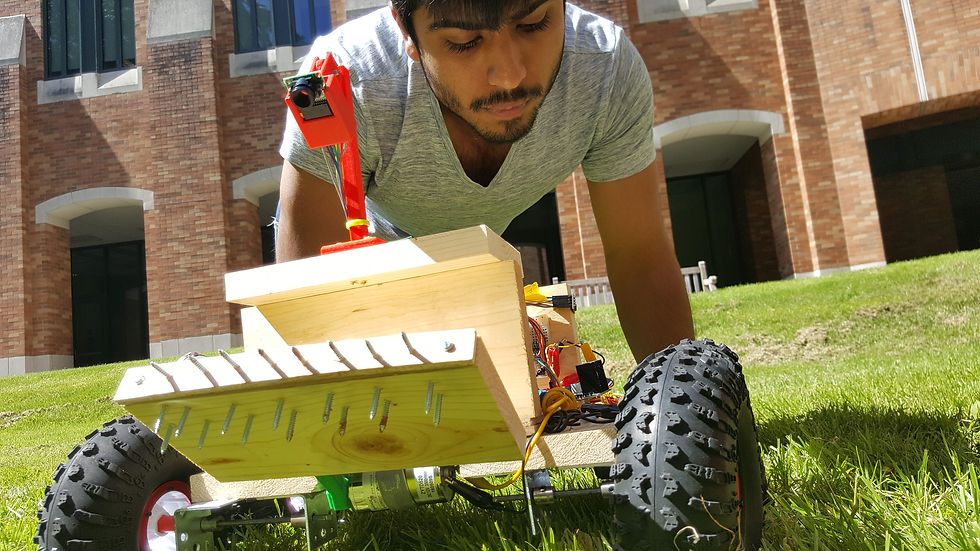
our model
Sailesh, Daniel, Jeremias - IMA AstroTurf
Jeremias couldn't breath
Daniel got dizzy and had to go AFK
Sailesh was fine
The AstroTurf works really well!
Driving was relatively straight. however, our movement is limited by our nut
the turning is really good
stabbing works! :)
Wi-Fi module is inconsistent. this causes the communication between the robot and computer to be glitchy at times. We have a patch fix working.
Battery issue: the battery pack supplying the arduino got too low. we are using the 12 V battery pack to supply the MPU now. The problem is we've already gone through 24 batteries...
Boundary Detection: worked pretty well. We will further optimize for white blocks.
Computer vision: working pretty well. it can detect the poop fairly reliably after we adjusted the HSV settings for the new setting. However, shadows are now a big issue,
Logical Issues: with our code. the state transitions are not optimal. For example, its especially crappy around alignment and boundaries
In theory, we can do this! we just need a TON of refinement

Sailesh, Jeremias, Daniel - WiFi Optimization
We need to speed up the rate of communication between the computer and the Elegoo because sometimes our robot moves too quickly and overshoots and rolls by the poop. We tried different setup tools, string, packets, etc.
We test drove at the AstroTurf again to get values for the computer vision (in particular the boundaries)
Sailesh -Quad Core Processor
Added Pi for on-board image processing
this allows us to not worry about the wifi issues we've been seeing earlier We don't need the WiFi chip or the voltage regulator anymore
Daniel - Video
Made a bomb video! million hits! https://drive.google.com/file/d/0BzokegCSY6auQ1JVRW5kLVBkSzA/view?usp=sharing
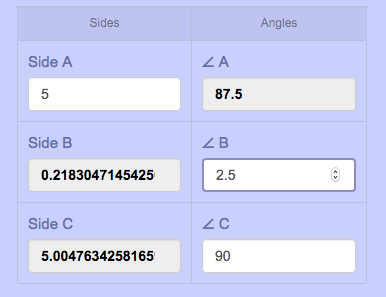
Daniel - Triangle
Finding the appropriate amount of error we can have

Sailesh, Daniel, Jeremias - Testing
We needed to retouch the RPi logic
the camera would send all gray inital images which would cause the boundary detection to go off, so we needed to fix that
There is also an almost 5x5 space already demarked
the only problem is that one line is the yellow line

SPI error: we needed to come back in to fix the camera
Sailesh, Daniel, Jeremias - Testing
fixed camera
camera detection is very reliable
worked on turning, logic is good
Gyro low battery
we work out
it's hot :(
also we are Poomba
Sailesh, Daniel, Jeremias - WERK
Redoo the wheels, with the metal nuts
test in darker lighting
Added more blades
Tested robot
Gyroscope wasn't working but everything else would theoretically work
the gyro the bike group gave us was slightly different so we
we also broke the elegoo's 3.3 V pin
Sailesh, Daniel, Jeremias - Please Work
got new gyro that looks the same but is apparently different enough that the code doesnt work too easily
after 3 different gyros, this one works mostly, has stead state error
It works half the time, the movement is severely limiting
We fixed everything else
we made the camera taller so that we have a wider field of the field
Gyro changes:
increased increment from 10 to 50 then to 100
developed a filter
We made made night filtered parameters as we were testing it in the late of night
rain proofed our robot because weather is bad in June
We spent $1600 + 50 a month on headlights
yeah we tied our phones to the front
WEDNESDAY MIDNIGHT REPORT - IT WORKS
see you at 1030
Misc
Tighten motor bracket because its slipping
secure the stabby plank
Readjusted rear right motor to give for more space.
The front 3D printed nut broke so we had to go replace them
To Doo:
Kickstarter
explain what the user needs to use the poopEE
comparisons
system specs needed
describe purpose


















Comments